pendekatan ergonomik
Disunting oleh Dr. Giovanni Chetta
Kaki, dalam peranannya sebagai "dasar antigraviti", pertama kali melakukan kontak dengan permukaan sokongan, menyesuaikan diri dengan melepaskannya, kemudian mengeras, menjadi tuas untuk "menolak" permukaan itu sendiri. Oleh itu, kaki mesti mengganti keadaan relaksasi dengan keadaan kaku. Penggantian ketegaran laksana membenarkan analogi dengan baling-baling nada berubah-ubah. Kaki belakang dan kaki depan disusun dalam bidang yang bersilang dengan cara berubah-ubah. Dalam keadaan ideal, kaki belakang disusun secara menegak dan kaki depan mendatar (pada sokongan mendatar permukaan). Ketika kaki berada di bawah beban, kilasan antara kaki belakang dan kaki depan dilemahkan dalam keadaan relaks (kaki menjadi platform yang dapat dimodelkan) dan ditonjolkan dalam kekakuan (kaki menjadi tuas). Susunan melengkung sebenarnya jelas, ungkapan tahap penggulungan heliks breech. Oleh itu, kaki tidak mempunyai arti lengkungan atau peti besi yang nyata tetapi nyata, yang naik semasa berliku dan turun semasa melepas heliks. Penggulungan heliks, dengan penekanan konsekuensi dari susunan melengkung yang jelas, sesuai dengan pengerasannya. Melengkung heliks, dengan redaman lengkungan yang nyata, adalah kelonggaran.
Kilasan heliks breech dihubungkan dengan putaran luar segmen suprapodalic (kaki dan femur). Talus, berputar ke luar secara bersepadu dengan tulang kaki, naik pada calcaneus sehingga menutup sendi mid-tarsal; kaki belakang menjadi menegak. Kaki depan yang melekat kuat ke tanah bertindak balas terhadap daya kilasan yang dikenakan pada kaki belakang; kaki oleh itu dikeraskan.
Talus adalah tulang yang tidak berkaitan langsung dengan otot (ia tidak mempunyai kemasukan otot), ia bergerak sebagai akibat daya yang dihantar oleh tulang yang berdekatan.pusing pada satah sagital (perpanjangan lenturan) dan merupakan tulang kaki kerana dipadatkan dengan tibia dan fibula, melalui forceps bimalleolar, dalam putaran segmen suprapodal pada satah melintang (putaran intra-luaran).
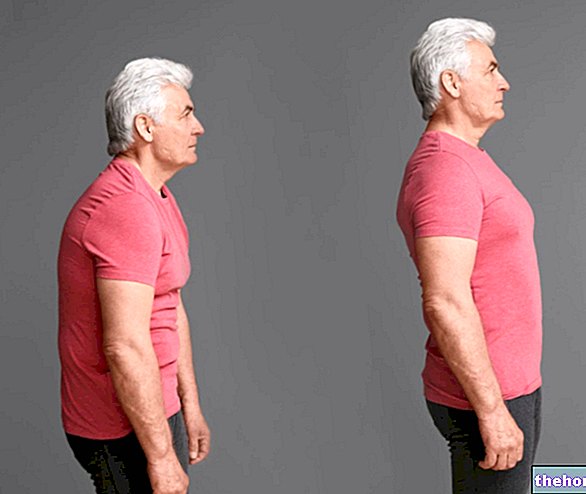
Tubuh manusia adalah sistem keseimbangan yang tidak stabil; ketinggian pusat graviti (idealnya anterior ke vertebra lumbar ketiga) berkenaan dengan pangkalan yang sempit dan struktur yang terdiri daripada sekumpulan artikulasi berturut-turut adalah faktor ketidakstabilan. Hanya kawalan yang berwaspada (sistem tonik postur) yang boleh berjaya keadaan ini, untuk mencari keseimbangan dinamik yang stabil pada kedudukan tegak dan keseimbangan dinamik yang tidak stabil semasa pergerakan (yang membolehkan transformasi tenaga berpotensi menjadi tenaga kinetik). Ini berlaku di atas segalanya berkat perkhidmatan maklumat (exteroceptors kulit dan proprioceptor) yang tepat dan tepat pada masanya sehingga memungkinkan tindak balas yang sangat tepat dengan campur tangan ekonomi yang bertenaga (tidak dapat dikesan secara elektromografik) oleh otot dengan berlakunya serat merah. Ini adalah acara maklumat yang paling penting kerana memberi hak istimewa kepada manusia untuk menyesuaikan diri dengan keadaan persekitaran yang paling berbeza.
Gait bipodal manusia dikondisikan oleh pengangkatan pusat graviti dan oleh nipisnya pangkalan sokongan, berbanding dengan pergerakan empat segi. Ini adalah tindakan yang kompleks yang dihasilkan dari interaksi antara kekuatan dalaman dan luaran yang diarahkan oleh sistem postur dan kawalan badan. "keseimbangan, yang mengatur momen demi saat, melalui otot, hubungan antara kekuatan. Sebilangan besar kumpulan otot anggota bawah aktif semasa berjalan (anggota bawah mempunyai 29 darjah kebebasan bergerak, sepadan dengan 48 otot ).
Pergerakan manusia adalah gabungan dorongan ke depan berirama dan ketinggian badan di atas. Pusat graviti badan semasa berjalan mempunyai kecenderungan sinusoidal pada satah sagital mencapai titik terendah dalam sokongan berganda (bipodalic) dan ketinggian maksimum dalam sokongan monopodalik, dengan perjalanan 4-5 cm.Dari sudut pandangan mekanikal, kemajuan badan di angkasa adalah hasil gabungan putaran sendi. Sama seperti pergerakan putaran roda menghasilkan pergerakan hadapan kenderaan, pergerakan putaran (bulatan separa) anggota badan atau bahagiannya mengakibatkan pergerakan ke depan seluruh badan. Terima kasih kepada kedudukan graviti pusat badan yang tinggi, pecutan badan kita pada asasnya adalah genesis graviti (tenaga berpotensi yang diubah menjadi tenaga kinetik). Hanya pada tahap sederhana pengecutan otot mempercepat dan inilah sebabnya kerana "lelaki itu boleh meneruskan perjalanannya dalam jangka masa yang lama. Sebenarnya, boleh dikatakan bahawa dalam berjalan kaki, kerja otot hanya diperlukan dalam pendakian berkala pusat graviti.
Kitaran berjalan ia termasuk di antara dua penyangga calcaneal dari kaki yang sama dan terdiri daripada fasa penanggung beban dan fasa berayun.
Fasa penanggung beban
- Sokongan tumit (penerimaan)
Apabila tumit bersentuhan dengan permukaan sokongan (penerimaan), heliks dilepaskan untuk membolehkan kelonggaran kaki meringankan berat badan dan menyesuaikan diri dengan permukaan itu sendiri. Untuk tujuan ini, anggota bawah berputar secara dalaman, "The astragalus, terpadu dengannya, oleh itu juga berputar secara dalaman (supinasi), rawan calcaneus, berputar secara luaran. Anggapan berat oleh kaki secara beransur-ansur dan maksimum apabila garis graviti jatuh di tengah permukaan breech. - Sokongan penuh (kenalan)
Apabila seluruh permukaan plantar bersentuhan dengan permukaan, putaran dalaman anggota badan tiba-tiba berubah menjadi putaran luaran. Ini memicu mekanisme yang mempunyai sendi subtalar sebagai tempat duduknya. Berikutan putaran anggota badan, talus berputar pada satah melintang secara luaran (sekitar 12 ° rata-rata) sebutan dan naik di atas calcaneus (jauh dari ligamen calcaneus-scaphoid-plantar). Pada gilirannya, calcaneus berputar secara dalaman, melingkar di sekitar sumbu "sumbu kompromi" ("sesaat" di mana proses peluasan-pelarasan berlaku: kaki belakang menjadi menegak melalui skru talus-calcaneal timbal balik.
Kuboid, yang kuat dihubungkan ke calcaneus, berpindah secara bertubi-tubi dengan anggapan "di atas bahu" rangkaian cuneiform.
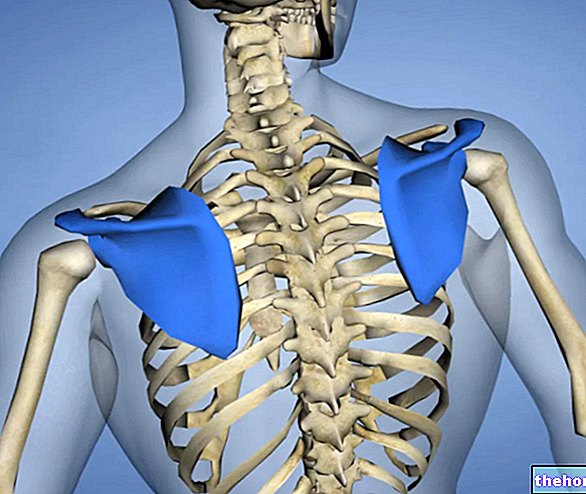
Kaki depan disusun dalam kontras putaran dengan kaki belakang untuk tindak balas ke tanah. Dengan cara ini terdapat "pembalut baling-baling breech dan akibatnya" lengkungan "kaki: sendi pertengahan tarsal disekat dan ada pengurangan berat serentak pada metatarsus IV dan V untuk penyebaran kaki depan yang belum tegar.
Otot peroneal (peroneal panjang) menarik kepala metatarsal pertama bersentuhan dengan tanah, melakukan kerja penstabilan sehingga berat badan sekarang diedarkan pada semua kepala metatarsal (kipas metatarsal); kaki berubah dari baling-baling menjadi "tuil bar" yang kaku. - Sokongan digital (penggerak)
Tumit diangkat dari tanah. Jari-jari, setelah menyesuaikan diri dengan kuat pada permukaan penyangga, lenturkan punggung. Ini menyebabkan aponeurosis plantar menjadi pendek, tegang sekitar. 1 cm (pendigitan aponeurosis plantar mencapai phalanges basal yang sesuai, menghubungkan ke periosteum, di segmen yang berdekatan dengan sendi) memicu mekanisme winch yang menyelesaikan kohesi intrapodalik.
Pusat graviti badan berpindah secara ventral dan badan mula jatuh ke hadapan. Campur tangan kawalan otot, terutama otot trisep sural, yang dibentuk oleh gastrocnemius dan soleus (selain tibial anterior, tibial posterior, longus peroneus dan flexor dorsal) dan sentuhan kontralateral tepat pada masanya, melakukan tindakan brek.
Pada fasa pendorong, daya yang bertindak pada kaki sama dengan 3-4 kali berat badan. Dalam keadaan fisiologi yang betul, kaki berkelakuan seperti heliks sedemikian rupa sehingga unjuran di permukaan pusat graviti badan kebanyakannya berpusat, iaitu melepasi paksi sendiri, yang sesuai dengan "kira-kira"paksi breech, paksi melepasi pusat ke kaki belakang dan di tengah antara jari kedua dan ketiga.

Fasa berayun
Fasa berayun mewakili persiapan persiapan untuk fasa beban. Putaran dalaman anggota badan, di sekitar paksi mekanikal, yang bermula pada fasa ini, adalah premis yang sangat diperlukan untuk putaran luaran berikutnya. Berkat penggiliran putaran ini, tenaga berpotensi diubah dalam tubuh manusia menjadi tenaga kinetik. Oleh itu, fasa berayun dan galas berkaitan dengan kesinambungan perkembangan. Pendulum breech sebenarnya adalah pendulum galas. Kompleks neuro-otot mengawasi penyerahan timbal balik ini dengan menstabilkan, memodulasi dan mencirikannya sebagai ungkapan keperibadian yang khas.
Semasa kelahiran, rangkaian saraf yang cenderung untuk berjalan sudah ada, namun, untuk memungkinkan perkembangan muskuloskeletal yang mencukupi dan sangat diperlukan, ia dihambat sementara oleh pusat-pusat yang lebih tinggi. Postur sebagai tindakan sukarela menjadi fenomena pematangan dan pembelajaran. Kira-kira satu tahun , mula-mula belajar dan kemudian berjalan secara automatik. Hanya pada usia sekitar dua tahun, berikutan perkembangan struktur relatif, kawalan automatik adalah efisien.
Oleh itu, dalam bidang melintang, biomekanik moden telah mengenal pasti elemen ruang keutamaan dalam statik dan dinamika manusia. Sebenarnya, dari putaran dalam bidang melintang, mekanisme antigraviti dipicu, yang memungkinkan pusat graviti untuk berhijrah ke atas. Ketinggian pusat graviti mengecas sistem dengan tenaga berpotensi, atau ketidakstabilan yang, bagaimanapun, seperti yang saya katakan, diubah menjadi tenaga kinetik yang sangat diperlukan dalam dinamika, sehingga memungkinkan kemajuan di ruang angkasa dengan penggunaan tenaga otot yang sederhana.
Sendi di mana pergerakan berlaku di satah melintang adalah, dengan rantai kinetik tertutup, koksofemoral dan subtalar. Khususnya, sendi coxofemoral dan sendi talus-scaphoid disusun secara analog dan disusun sesuai. Pergerakan penting dalam mekanisme antigravitasi pinggul adalah perpanjangan dan putaran luaran yang bersamaan. Dalam perpindahan dari lenturan ke lanjutan, femur kemudian berputar ke luar, mencerminkan dirinya dalam mekanisme pelepasan breech. Oleh itu, ini adalah keadaan fungsi anatomi yang menyokong antigraviti kita.
Analisis ciri-ciri morfologi dan fungsi anggota bawah yang berkaitan dengan satah melintang membuka bab besar patologi struktur yang mempertimbangkan anomali putaran femoral-tibial dan kesan pada fungsi breech dan sebaliknya. Dengan cara ini, jambatan yang kuat dilemparkan yang semakin menghubungkan kaki ke segmen badan yang melintang, khususnya, dengan tali pinggang pelvis, dengan tali pinggang skapulo-humeral, dengan engsel serviks-oksipital hingga ke sendi temporomandibular, dalam konteks biomekanik dan pato-mekanikal.
Artikel lain mengenai "Postur dan Kesejahteraan - Kepentingan" Plantar Support "
- Postur dan Kesihatan - Kaki dan Postur
- Postur badan
- Postur dan kesejahteraan - Sokongan Podalik yang Tidak Betul
- Postur dan kesejahteraan - Skoliosis Berfungsi
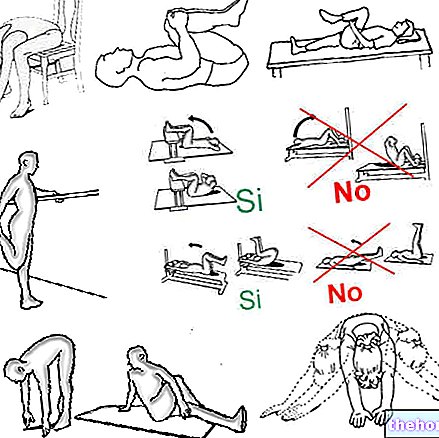
- Postur dan kesejahteraan - Disfungsi organik dari postur
- Postur dan kesejahteraan - Pemeriksaan postur dan pendidikan semula
- Postur dan kesejahteraan